Subsections
2 連立一次方程式(反復法)
実用的なプログラムでは,非常に大きな連立方程式を計算しなくてはならない.数百万元 に及ぶことも珍しくない.これを,ガウス・ジョルダン法で 計算するの時間的にほとんど不可能である.そこで,これよりは格段に計算の速い方法が 用いられる.ここでは,その一つとして反復法を簡単に説明する.当然ここでも,連立方程式
を満たす
ここで,ある計算によりn回目で求められたものを
![]() とする.そして,計算回数を増やして,
とする.そして,計算回数を増やして,
| (2) |
になったとする.この様に計算回数を増やして,真の解に近づける方法を反復法という.
この様な方法は,行列
![]() を
を
![]() と分解するだけで,容易に作ることが
できる.たとえば,
と分解するだけで,容易に作ることが
できる.たとえば,
とすればよい.ここで,
2.1 ヤコビ法
係数行列![$\displaystyle \left[ \begin{array}{@{\,}ccccc@{\,}} a_{11} & a_{12} & a_{13} & ...
... & \ddots & \vdots \\ a_{n1} & a_{n2} & a_{n3} & \ldots & 0 \end{array} \right]$](img14.png) |
(4) |
と分解し,右辺第1項が行列
![$\displaystyle \boldsymbol{S}^{-1}= \left[ \begin{array}{@{\,}ccccc@{\,}} a_{11}...
...vdots & \ddots & \vdots \\ 0 & 0 & 0 & \ldots & a_{nn}^{-1} \end{array} \right]$](img17.png) |
(5) |
と簡単に求めることができる.
とすると,k+1番目の解は
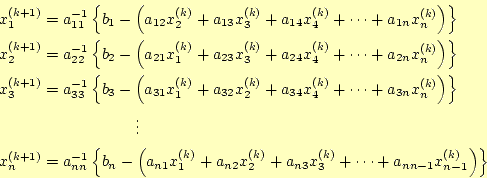 |
(6) |
と計算できる.これを繰り返して連立方程式の解を求める方法が,ヤコビ法である.
2.2 ガウス・ザイデル法
ヤコビ法の特徴では,
そこで,
![]() の各成分の計算が終わると,それを直ちに使うことが考えば,
メモリーは半分で済む.即ち,
の各成分の計算が終わると,それを直ちに使うことが考えば,
メモリーは半分で済む.即ち,![]() を計算するときに,
を計算するときに,
| (7) |
とするのである.実際の計算では,
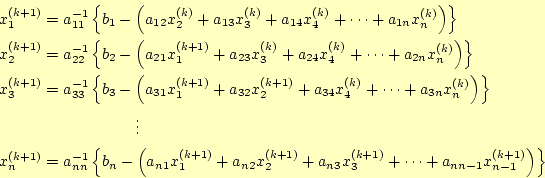
と計算できる.これを繰り返して連立方程式の解を求める方法が,ガウス・ザイデル法である.
2.3 SOR法
ガウス・ザイデル法をもっと改善する方法がある.ガウス・ザイデル法の解の修正は,
具体的な計算手順は,次のようにする.ここでは,ガウス・ザイデル法の式
(8)を用いて,得られた近似解を
![]() としている.
としている.

これを繰り返して連立方程式の解を求める方法が,SOR法である.
ここで,問題なのが加速緩和係数![]() の値の選び方である.明らかに,それが1の場
合,ガウス・ザイデル法となりメリットは無い.また,1以下だと,ガウス・ザイデル法
よりも収束が遅い.ただし,ガウス・ザイデル法で収束しないような問題には使える.
の値の選び方である.明らかに,それが1の場
合,ガウス・ザイデル法となりメリットは無い.また,1以下だと,ガウス・ザイデル法
よりも収束が遅い.ただし,ガウス・ザイデル法で収束しないような問題には使える.
従って,1以上の値にしたいわけであるが,余り大きくすると,発散するのは目に見えて いる.これについては,2を越えると発散することが分かっている.最適値となると,だ いたい1.9くらいが選ばれることが多い.
ホームページ: Yamamoto's laboratory
著者: 山本昌志 Yamamoto Masashi
2006-02-08